

Link to Latest Report: Coming Soon!
Background:
The status of our aging infrastructure in the United States (US) or elsewhere around the world has been recently one of the biggest challenges facing governments and decision-makers. According to the latest American Society of Civil Engineers (ASCE) Infrastructure Card [1], America’s cumulative GPA is a D; a grade that comes with a large overwhelming infrastructure bill. Maintaining, repairing, or replacing existing infrastructure systems is a major undertaken activity in the US and around the world. Nonetheless, there is a dire need to have a forward look at future and next-generation infrastructure systems. In the US, the ASCE has laid three pillars for solving the nation’s infrastructure problems, i.e. (a) strategic and sustained investment, (b) bold leadership and thoughtful planning, and (c) careful preparation for the needs of the future. A major component of the ASCE’s “Preparing for the Future” vision [1] is to utilize emerging technologies to ensure infrastructure resilience in the face of extreme events and develop processes that modernize and extend the life of infrastructure, expedite repairs or replacement, and promote cost savings. The innovative applications of emerging technologies in infrastructure assessment and structural health monitoring has shaped several research thrusts among the civil and structural engineering communities and is one of the key motives of this proposed study, especially as the ABC-UTC is expanding its vision and role into Innovative Bridge Technologies for its new term starting next year, i.e. IBT/ABC-UTC.
Several global technologies are on the rise such as aerial robotics, which are commonly referred to as unmanned aerial systems (UAS) or unmanned aerial vehicles (UAVs), or simply “drones”. Many of the critical lifelines and infrastructure systems such as bridge networks or power grids and transmission lines have taken serious steps towards adopting UAVs for regular maintenance and inspection. In fact, the federal National Cooperative Highway Research Program (NCHRP) has now funded two recent initiatives for considering UAVs and drones for bridge inspection: (1) NCHRP 12-122: Proposed AASHTO Guidelines for Applications of Unmanned Aerial Systems (UAS) Technologies for Element-Level Bridge Inspection, which is a two-year project expected 2 to be concluded in 2023, and (2) NCHRP 23-20: Guidebook for Implementation of UAS Operational Capabilities, which is another two-year project expected to be concluded in 2024. Further using bridges as one example of critical infrastructure systems, we find that a large deal of research studies has been sponsored, mostly through various Departments of Transportation (DOTs), to use UAVs for visual bridge inspections. However, none of the ongoing or emerging efforts have properly considered fully automating UAVs launch and path planning for dynamic vibration and structural system identification of bridges or other infrastructure systems. Moreover, future applications of UAVs to rapidly inform post-disaster decisions such as assessing a bridge condition to open it for traffic or not would be of great importance, is another motivation of this proposal.
Objective:
Specific objectives for this project are:
(1) develop and establish a step-by-step simulation environment for testing drone-based bridge inspection methods for rapid assessment.
(2) use actual bridge case studies (either simple cases of on-campus pedestrian bridges or actual NV highway bridges under traffic loading) to implement fully- or semi-autonomous path planning algorithms for video monitoring of vibrating bridges. For implementation case studies, we will attempt to focus on both service load conditions as well as extreme events such as earthquakes using testbeds from upcoming shake table tests at the Earthquake Engineering Laboratory at the University of Nevada, Reno
Scope:
TASK #1 – Selection and Implementation of Path Planning Algorithms for Bridge Inspection and Vibration Monitoring
As mentioned above, a recent MS study under the supervision of PI Moustafa has looked into simulation environments for drones, and part of the study focused on drone launch and path planning. A summary of the different path planning algorithms synthesized in our previous work is shown in Figure 6. In the first task of this proposed study, we will select and finalize the short list of promising algorithms that are more likely suitable for bridge inspections and infrastructure applications. Once the short list of promising algorithms is established, those algorithms will be programmed and implemented into proper platforms (e.g. Robotics Operating Systems, ROS) to test and compare in different simulated environments as in Task 2.
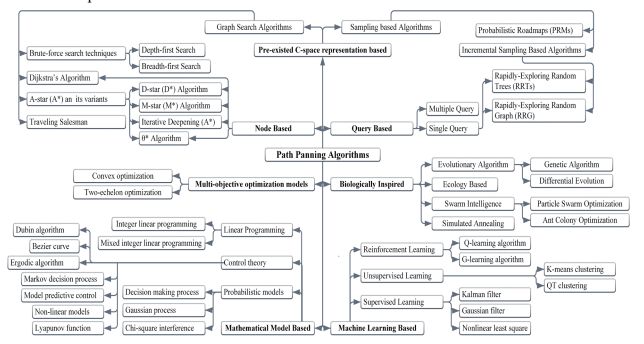 Figure 1. Summary of different drone path planning algorithms to consider for this study
Figure 1. Summary of different drone path planning algorithms to consider for this study
TASK #2 – Develop simulation environment for testing autonomous drone path planning
The objective of this task is to test the validity and accuracy of the selected and implemented drone path planning algorithms from Task 1 using a simulated environment. For this task, the platform Robotics Operating Systems (ROS) will be used. Different testing environments will be simulated with varying levels of complexity based on some of our previous work in this area. Sample of our previous work is shown in Figures 7 and 8. Figure 7 shows a simple testing environment with a single room or space where a drone is simulated, launched, and programmed to follow a certain path. Figure 8 shows a more realistic testing urban environment with a bridge and buildings. The simulation environments shown will be used herein to test the implemented algorithms and assess how drones can perform bridge inspection tasks. The different algorithms will be compared and assessed using quantitative metrics such as estimated travel time and distance. The various algorithms tested in this task will be further vetted and shortlisted for field implantation in Task 3.
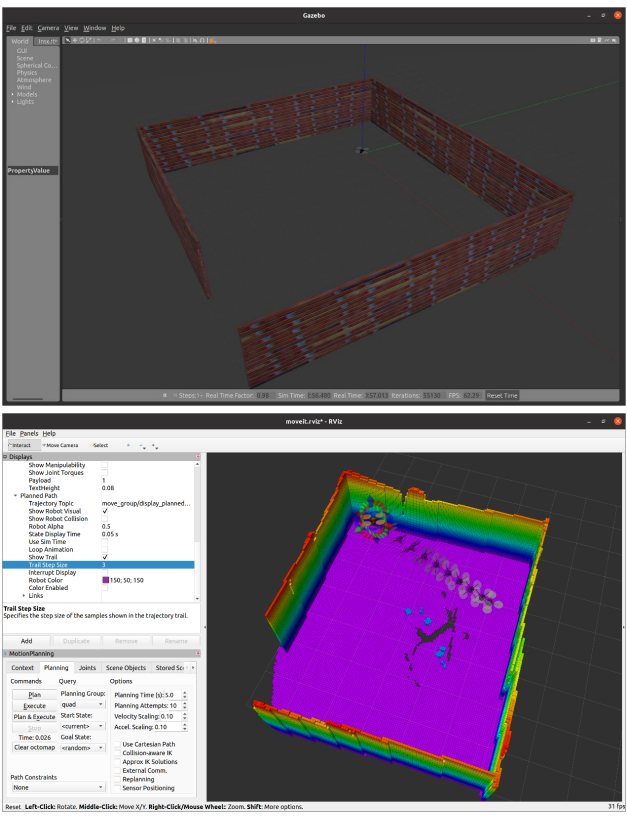 Figure 2. Example of a simulated testing scenario for a single room developed at UNR using ROS, and screenshots of drone path and motion planning
Figure 2. Example of a simulated testing scenario for a single room developed at UNR using ROS, and screenshots of drone path and motion planning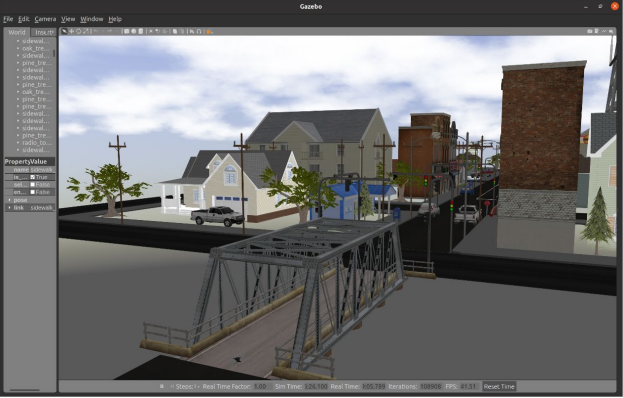 Figure 3. Example of a more realistic simulated testing scenario of an urban environment with buildings and bridges also developed at UNR by our team
Figure 3. Example of a more realistic simulated testing scenario of an urban environment with buildings and bridges also developed at UNR by our team
TASK #3 – Implementation case studies for collecting drone-based bridge system or component vibration videos
The objective of this task is to implement the final tested algorithms from Task 2 using actual field case studies. Several case studies will be considered in this project. First, an on-campus steel truss footbridge will be used for drone-based video monitoring under ambient and pedestrian traffic vibrations. We have done the same before (see Figure 9) using stationary cameras and mechanical sensors, and as such, full vibration information about the bridge already exists and will be used in this task for ultimate verification purposes of data obtained from drone videos. Two levels of verification will be considered here: (1) confirm the actual implemented autonomous path of the drone and the resulting collected video, and (2) quantify accuracy and viability of the structural health monitoring data extracted from the drone videos. Two other case studies might be considered. We will work closely with NV DOT to identify a bridge that can be monitored under traffic-induced and ambient vibrations, and using one of the upcoming large[1]scale shake table tests to be conducted at the Earthquake Engineering Laboratory at UNR.
TASK #4 – Results dissemination and Final report
A final report will be prepared and submitted first to the advisory panel for review and comments then a revised version will be widely disseminated through the ABC-UTC. If implementation case studies are successful, the report will then be complemented with ABC-UTC guide (see section 2.2.2) for implementation steps and guidance towards autonomous bridge inspection. It is 9 expected to have at least two publications on the simulation and implementation parts of the study to be submitted for potential publication in reputable conference or peer-reviewed journals. Figure 9. Overview of UNR campus footbridge monitoring using stationary cameras and sample of data processing and extracted modal properties of the bridge. This bridge case study will be used for verification purposes for drone videos to be collected in this project.
Research Team:
Principal Investigator: Dr. Mohamed Moustafa